Wireless Control LED using radio Frequency
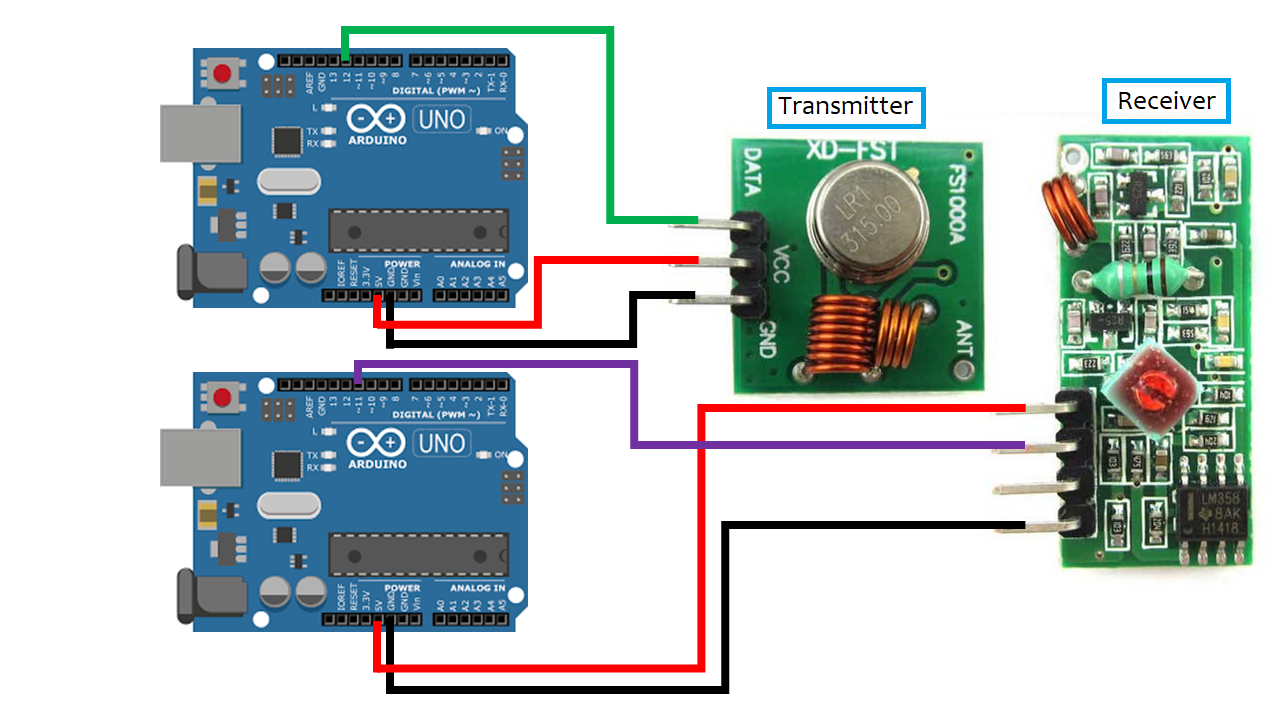

Transmitter :
Working voltage: 3V – 12V fo max. power use 12V
Working current: max Less than 40mA max , and min 9mA
Resonance mode: (SAW)
Modulation mode: ASK
Working frequency: Eve 315MHz Or 433MHz
Transmission power: 25mW (315MHz at 12V)
Frequency error: +150kHz (max)
Velocity : less than 10Kbps
So this module will transmit up to 90m in open area .
Receiver :
Working voltage: 5.0VDC +0.5V
Working current:≤5.5mA max
Working method: OOK/ASK
Working frequency: 315MHz-433.92MHz
Bandwidth: 2MHz
Sensitivity: excel –100dBm (50Ω)
Transmitting velocity: <9.6Kbps (at 315MHz and -95dBm)
the use of an optional antenna will increase the effectiveness of your wireless communication. A simple wire will do the trick.
TX Code
//simple Tx on pin D12
//Written By : Mohannad Rawashdeh
// 3:00pm , 13/6/2013
//http://www.genotronex.com/
//..................................
#include
int s=8;
char *controller;
void setup() {
Serial.begin(9600);
pinMode(13,OUTPUT);
pinMode(s,INPUT);
vw_set_ptt_inverted(true); //
vw_set_tx_pin(12);
vw_setup(4000);// speed of data transfer Kbps
}
void loop(){
int x=digitalRead(s);
Serial.println(x);
delay(500);
if(x==1){
controller="A1" ;
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx(); // Wait until the whole message is gone
digitalWrite(13,1);
delay(1000);
digitalWrite(13,0);
delay(1000);
controller="B1" ;
vw_send((uint8_t *)controller, strlen(controller));
vw_wait_tx(); // Wait until the whole message is gone
digitalWrite(13,1);
delay(1000);
digitalWrite(13,0);
delay(1000);
}
}
RXCode
//simple Tx on pin D12
//Written By : Mohannad Rawashdeh
// 3:00pm , 13/6/2013
//http://www.genotronex.com/
//..................................
#include
void setup()
{
vw_set_ptt_inverted(true); // Required for DR3100
vw_set_rx_pin(12);
vw_setup(4000); // Bits per sec
pinMode(13, OUTPUT);
vw_rx_start(); // Start the receiver PLL running
}
void loop()
{
uint8_t buf[VW_MAX_MESSAGE_LEN];
uint8_t buflen = VW_MAX_MESSAGE_LEN;
if (vw_get_message(buf, &buflen)) // Non-blocking
{
if((buf[0]=='A')&&(buf[1]=='1')){
digitalWrite(13,1);
delay(1000);
}
}
else{
digitalWrite(13,0);
}
} 
You may also like
How to Make Wireless / Gesture Control Robotic Hand
29 April, 2022

Arduino 3D Wire Bending Machine
15 December, 2021
